20180410
Da in der Woche nach Ostern alle angeschlagen war, musste ich etwas Zeit im Keller verbringen. Auf YT fand ich ein Video zu einem Modell, dass ich auch auf thingiverse schon öfter mal angeschaut hatte, aber mich nie dazu durch gerungen habe es zu drucken. Da ich die zusätzlich benötigten Teile dazu alle vorrätig hatte machte ich mich ans Werk.
Nach dem Drucken der Teile musste ich noch die Servos für den Raupenantrieb auf Dauerdrehung umbauen.
Exkurs: Servos und deren Umbau

Ein Servo aus dem Modellbau wird hauptsächlich dazu benutzt etwas zu bewegen.
Servos werden bei ferngesteuerten Modellen eingesetzt um Teile zu drehen. Bei Autos eben die Lenkung, bei Flugzeugen die Ruder, bei Booten halt das Ruder unter Wasser. Allgemein halt alles was sich irgendwie hin und her bewegen muss. Servos haben im Normalfall 3 Anschlussleitungen (+), (-) und (Signal). +/- sollte klar sein und das Signal gibt dem Servo vor auf welche Position er sich drehen soll. Schwenkbereich ist meistens 180°. Der Servo wird mit PWM (siehe Exkurs beim Bubbleblast) angesteuert. Alle 20ms (Beispiel, es gibt auch Servos die andere Zeiten brauchen) wird der Pegel am Signalanschluss zwischen einer und zwei ms auf HIGH gelegt, der Rest der 20ms ist das Signal auf LOW. Je nachdem wie lange der Pegel HIGH ist, bewegt der Servo seinen Arm. 1ms -> 0°; 1,5ms -> 90°; 2ms -> 180°. Die Position des Arms erkennt der Servo über ein Potentiometer, also einen Widerstandsschleifring, der direkt mit der Achse verbunden ist. (Das war der Text, den ich auch bei der Ente schon geschrieben hatte). Um den Servo jetzt als dauerhaft drehend umzubauen muss man den Potentiometer still legen und der Servosteuerung vorgaukeln, dass der Servo immer in der Mitte steht. Zusätzlich muss man die mechanischen Anschläge, die eine 360°-Drehung verhindern, entfernen. Das ist je nach Servotyp anders. Bei meinen Servos musste ich das Poti ablöten und zwei identische Widerstände als Spannungsteiler statt dessen einlöten. In dem kleinen Gehäuse war das etwas knifflig, aber machbar. Wenn der Servo jetzt das Signal bekommt auf 180° zu drehen, steuert die Ekeltronik den Motor an, registriert aber keine Änderung am Poti, somit wird der Motor weiter angesteuert und durch die entfernten Anschläge kann er frei durchdrehen. Dadurch hat man einen recht drehmomentstarken kleinen Getriebemotor, der ohne viel Aufwand die Richtung wechseln kann.
Nachdem alles zusammengesteckt war hab ich den Empfänger den ich noch von meiner Quadrocopter-Fernbedienung übrig hatte verbaut und mit der Fernbedienung verbunden. Ich hab das dann so konfiguriert, dass ich die Ketten jeweils einzeln steuere und die Schaufel mit einem Drehregler an der Fernbedienung auf und ab fahren kann. Als Raupenketten hab ich zum Testen einfach mal Moosgummistreifen zusammen geklebt. Ich werde mir noch Ketten aus flexiblem Material drucken, dazu muss ich aber erst etwas am 3D-Drucker umbauen, womit ich noch nicht ganz fertig bin.
Video:
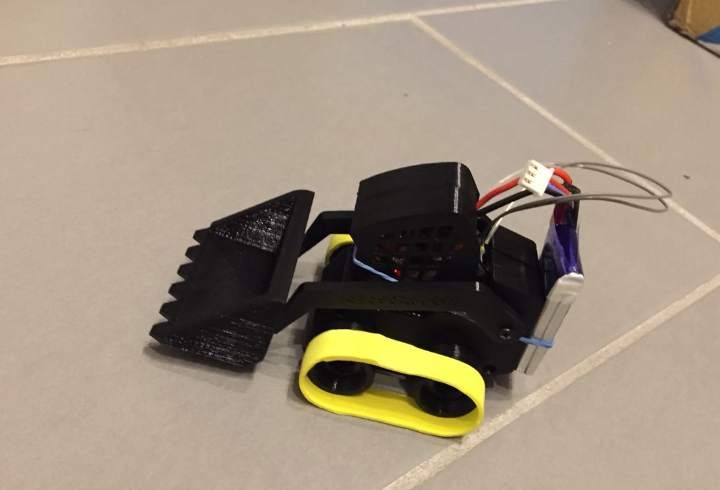
Mittlerweile hab ich auch einen kleineren Akku gefunden, der in die Fahrerkabine passt, dadurch sieht der Kompaktlader nicht so verbastelt aus.
20190318
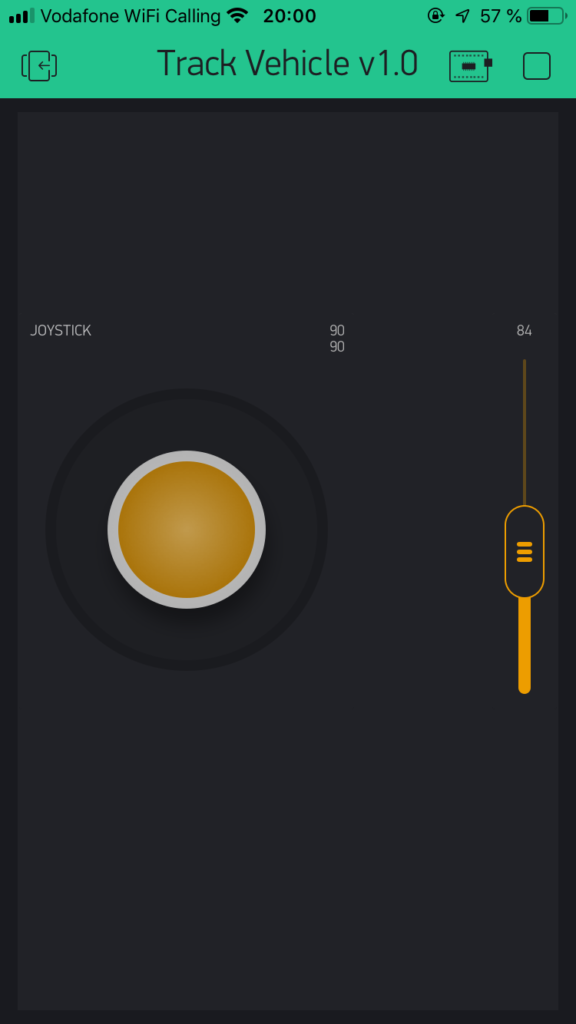
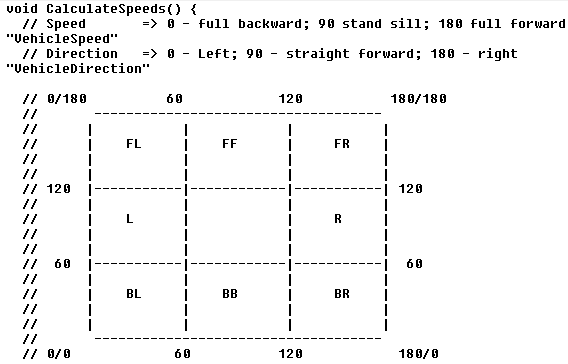
Fast ein Jahr später hab ich endlich ein Video von der zweiten Version gemacht. Der Akku ist mittlerweile in das Gehäuse gewandert und ich habe aus flexiblem Filment die Ketten für den Kompaktlader gedruckt. Die Quadrocopter-Fernbedienung nutze ich für den Kompaktlader auch nicht mehr – ich habe einen Arduino-kompatiblen Wemos D1 Mini als Herzstück gewählt. Der hat WLAN! Dadurch kann ich das Teil mit dem Händi steuern. Ich habe mich erst mal für „Blynk“ entschieden, da man damit recht schnell eine kleine Oberfläche erstellen kann, hier ein Joystick, dessen Wertebereich ich in ein paar Felder unterteilt habe – ich habe erst versucht die Joystickwerte irgendwie in eine Formel zu packen und somit eine „echte“ Analogsteuerung zu imitieren, aber spätestens das Rückwärtsfahren hat es mir versaut, da ein Kettenfahrzeug nicht so funktioniert wie ein normales Fahrzeug mit mehreren Achsen. Deshalb gab es meine „Quick&Dirty“-Lösung, was aber bei den nicht sehr fein dosierbaren billigen Servos auch nicht weiter schlimm ist.
Bedienoberfläche:
„Logik“
Das fertige Fahrzeug:

Und zu guter letzt das Video:
So kann man das mal lassen vorerst mal lassen.