Nach der Seifenblasenmaschine also eine weitere Aufgabe, die ich mir selbst gestellt habe. Wir waren vor ner Weile im Luisenpark und sind da dann an eine Stelle gekommen, an der man schön auf den „Teich“ mit den Booten schauen und auch die Karpfen streicheln kann. Dort schwamm eine Ente mit 3 Küken rum und ließ sich von den anwesenden Senioren nicht beirren. Als die Entenmama auf die Senioren zu schwamm spritzte sie Wasser aus ihrem Schnabel in Richtung der staunenden Herrschaften. Auf der Bank hinter den Leuten saß ein grinsender Typ mit Fernbedienung. Meine Frau ahnte an meinem Blick und nach dem kurzem Gespräch mit dem Typen was kommen würde.
Im Kopf bin ich kurz meine Elektronikkiste durchgegangen:
– Fernbedienung vom Quadrokcopter [CHECK]
– Modellbauservos [CHECK]
– Motor [CHECK]
– Empfänger [CHECK]
– Plastikente mit Küken[BZZZZ]
– Motorregler [BZZZZ]
– Pumpe für Spritzer [BZZZZ]
Die fehlenden Teile abends direkt mal bestellt und während der Wartezeit etwas ins Thema Modellboote eingelesen. Es gab auch ein Bautagebuch, in dem jemand beschreibt wie er seine eigene ferngesteuerte Ente gebaut hat, allerdings ohne Spritzvorrichtung. Das Bautagebuch ist zwar recht gut, allerdings lässt es einige Fragen offen. Ich habe zu diesem Zeitpunkt mit Modellbau noch keinerlei Berührungspunkte (außer eine Homepage mit Onlineshop für den Modellbaushop eines Kollegen erstellt) gehabt und wusste auch nicht wirklich wie so ein Fahrtregler funktioniert.
Bei meiner Fernbedienung, die ich für meinen FPV-Quadrocopter gekauft habe, war noch ein Empfänger dabei, den ich einfach mal mit ein paar Servos verbunden habe.
Exkurs Servo:
Ein Servo wird bei ferngesteuerten Modellen eingesetzt um Teile zu drehen. Bei Autos eben die Lenkung, bei Flugzeugen die Ruder, bei Booten halt das Ruder unter Wasser. Allgemein halt alles was sich irgendwie hin und her drehen muss. Servos haben im Normalfall 3 Anschlussleitungen (+), (-) und (Signal). +/- sollte klar sein und das Signal gibt dem Servo vor auf welche Position er sich drehen soll. Schwenkbereich ist meistens 180°. Der Servo wird mit PWM (siehe Exkurs beim Bubbleblast) angesteuert. Alle 20ms (Beispiel, es gibt auch Servos die andere Zeiten brauchen) wird der Pegel am Signalanschluss zwischen einer und zwei ms auf HIGH gelegt, der Rest der 20ms ist das Signal auf LOW. Je nachdem wie lange der Pegel HIGH ist, bewegt der Servo seinen Arm. 1ms -> 0°; 1,5ms -> 90°; 2ms -> 180°. Die Position des Arms erkennt der Servo über ein Potentiometer, also einen Widerstandsschleifring, der direkt mit der Achse verbunden ist.
Die Empfänger die im Modellbau eingesetzt werden haben mehrere Kanäle, die man mit der Fernbedienung ansteuern kann, Die Kanäle geben dann das Typische Servosignal aus. Fahrtregler funktionieren ähnlich – nur dass sie eben nicht auf Position drehen, sondern eben die Drehzahl und Drehrichtung eines Motors mit dem bekannten 1-2ms-PWM-Signal regeln.
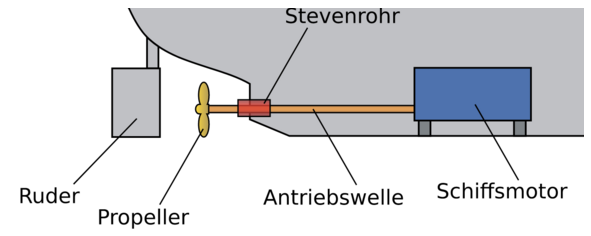
Eine weitere Besonderheit bei Modellbooten ist das „Stevenrohr“. Vor 3 Wochen hatte ich das Wort noch nie gehört. Ein Stevenrohr verhindert das Eindringen von Wasser an der Welle des Ruders und der Schiffsschraube. Im Prinzip ist es ein mit Fett gefülltes Rohr in dem die Welle läuft. Das obere Ende der Welle ist am Motor (Schiffschraube) oder am Ausleger eines Servos (Ruder) befestigt und unten im Wasser dann eben die Schiffschraube und das Ruder. So ein Teil hab ich mir dann auch mal bestellt um zu sehen, wie ich das später selbst baue.
Als die Ente geliefert wurde ging es ihr direkt an die Federn. Ich habe entlang der Flügellinie mit einem Cuttermesser geschnitten und so eine großzügige Öffnung geschaffen. Das ausgeschnittene Teil wird später dann der Deckel dafür werden. Den Kopf hab ich vorerst noch dran gelassen.
Den Testaufbau will ich schon ungefähr mit den Maßen machen, die auch später in der Ente eingebaut werden. Ich habe mir dazu ein Stück Laminatholz genommen und darauf die Teile provisorisch mit Doppelklebeband befestigt.
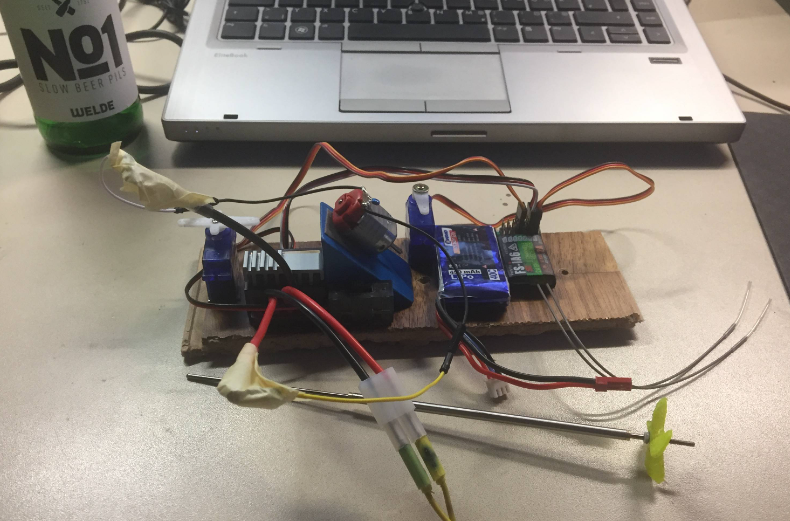
Die Zuordnung der Kanäle hab ich beim Testaufbau auch schon getestet:
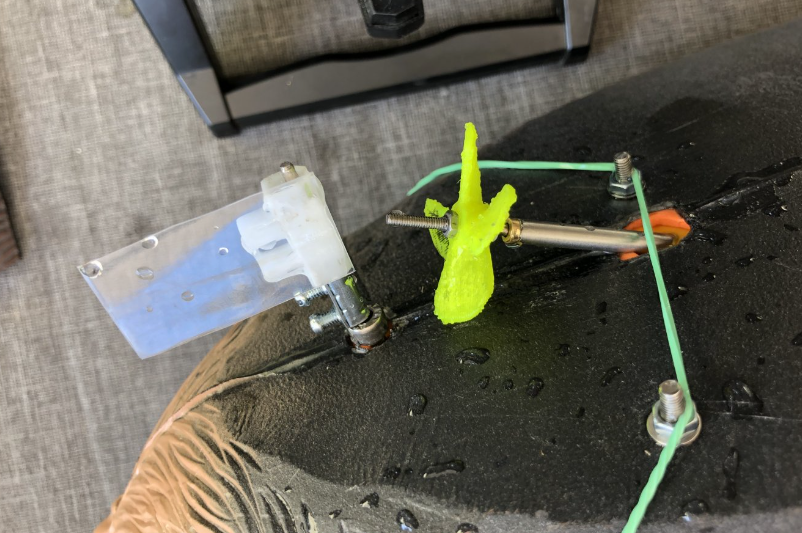
In der Ente sieht das dann so aus:

Im CAD hab ich die „Innereien“ gezeichnet und einen Probedruck rausgelassen. Wenn man vorher ordentlich misst muss man nicht so viel korrigieren – und ich muss sagen der erste Druck passt ganz gut.

Die Schiffschraube ist auch aus dem 3D-Drucker. Ein Ruder muss ich noch entwerfen und befestigen – das derzeitige funktioniert zwar, ist aber nur ein Provisorium, da ich eine Probefahrt machen wollte.
Nach der Probefahrt wusste ich auch, wo noch Wasser reinkommt und wo ich abdichten muss. Dazu hab ich einfach noch Silikon genommen. Jetzt brauch ich nur noch eine gute Lösung um den Deckel sauber auf der Ente zu befestigen.

Ein Video von der Probefahrt gibts natürlich auch:
Ob und wann die Ente noch einen Spritzer bekommt weiss ich noch nicht. Vorerst funktioniert sie zufriedenstellend.