Da mein Vater sehr oft paddeln geht, entdeckt er immer wieder komische Dinge am Ufer der unterschiedlichsten Gewässer. Vor kurzem hat er so ein „Futterboot“ entdeckt. Da es den Anschein hatte, dass niemand das Boot suchte und auch Nachfragen in ansässigen Angelvereinen keinen Aufschluss über den Havarie-Kapitän gaben, packte er es ein und brachte es mir.

Also erst einmal Bestandsaufnahme. Da keine Fernbedienung vorhanden ist, überlgegte ich mir zwei Möglichkeiten:
1. Die Elektronik im Boot durch Standardteile aus dem RC-Modellbau ersetzen um das Boot mit einer meiner vorhandenen FlySky-Fernbedienungen steuern zu können.
2. Anstatt RC-Modellbaukomponenten einen ESP8266 oder ESP32 verwenden und das Teil einfach per Bluetooth oder WLAN über ein Smartphone steuern.
Die „Aktoren“ (Motoren, Lampen Servos) wollte ich weiter nutzen.
Das Boot ließ sich durch entfernen der von oben sichtbaren Schrauben einfach öffnen – nichts war verklebt oder verklipst, was schon mal sehr gut ist.
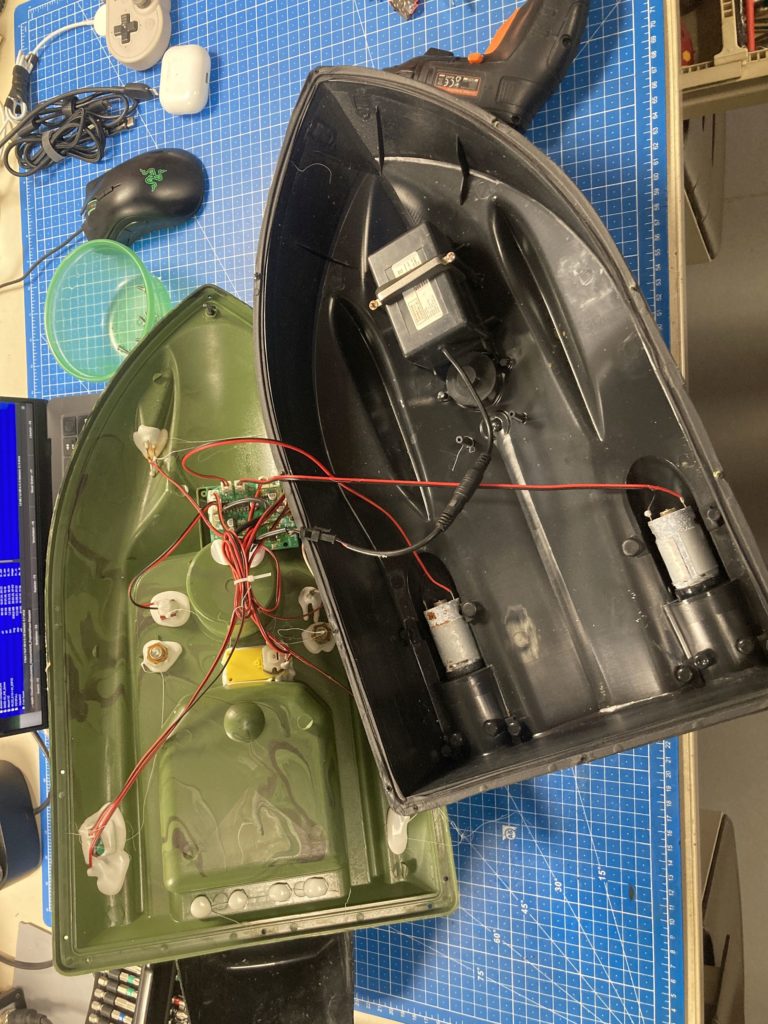
Im Innern ist ausser viel Luft fast nichts. Zwei Motoren für den Antrieb, ein paar Leitungen, ein geschlossener Akku und eine Platine, diverse LED und ein weiterer Motor zum Lösen der Futterklappe. An der Stelle hätte ich eiunen Servo erwartet, aber aus Kostengründen wird hier wohl ein günstiger DC-Motor eingesetzt.

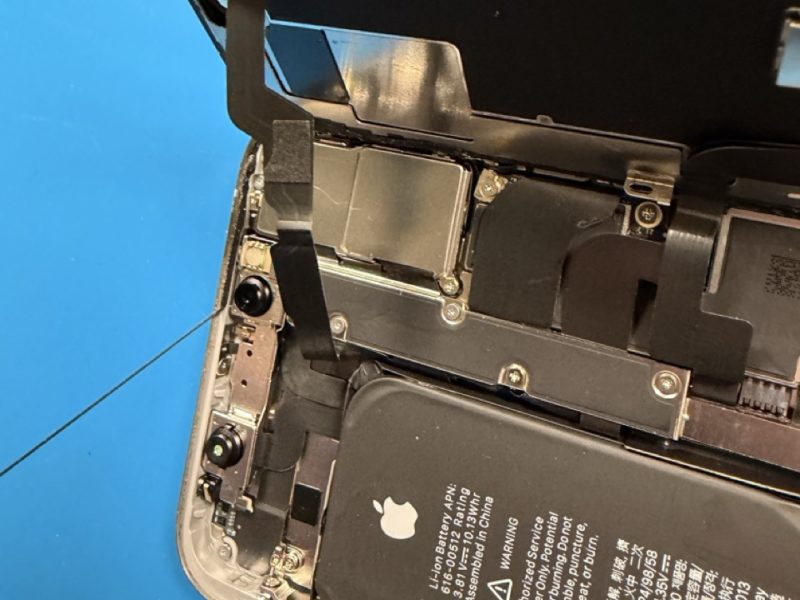
Die Platine hat durch die wohl längere Liegezeit am Ufer etwas Feuchtigkeit abbekommen und ist stark korrodiert, egal – die wird eh nicht mehr benötigt.

Die Antriebsmotoren jedoch sahen etwas „knusprig“ aus und ließen sich nicht drehen – weder direkt an einem frischen Akku noch von Hand und auch nicht von Hand mit Zange. Deshalb wurden sie über Nacht in ein WD40-Bad gelegt, das sollte die Korrosion etwas lösen. Hoffnung hatte ich tatsächlich keine und hab hab direkt passende Ersatzmotoren in Fernost bestellt.
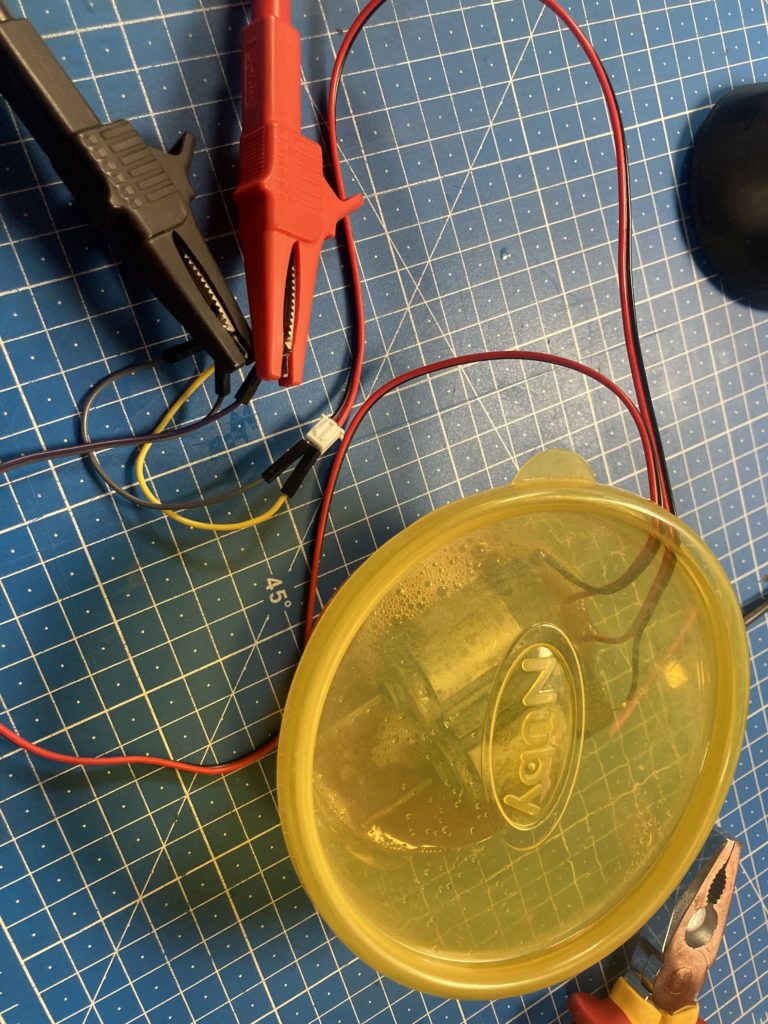
Nach einer Nacht im WD40 hab ich dann doch nochmal versucht die Wellen der Motoren etwas zu lösen, was mit dosierter Gewalt auch möglich war. Dann hab ich die Motoren in einem Mineralölbad bei angelegten 5V für einige Minuten laufen lassen. Anfangs zogen die Motoren zusammen knapp 1,1 Ampere aus dem Netzteil. Nach kurzer Zeit pendelte sich die Stromaufnahme bei ~0,8 Ampere ein und eide Motoren liefen sehr ruhig. Ob die WD40- und Öl-Kur den Motorkohlen geschadet hat wird sich zeigen, falls ja ist ja Ersatz aus Fernost unterwegs.
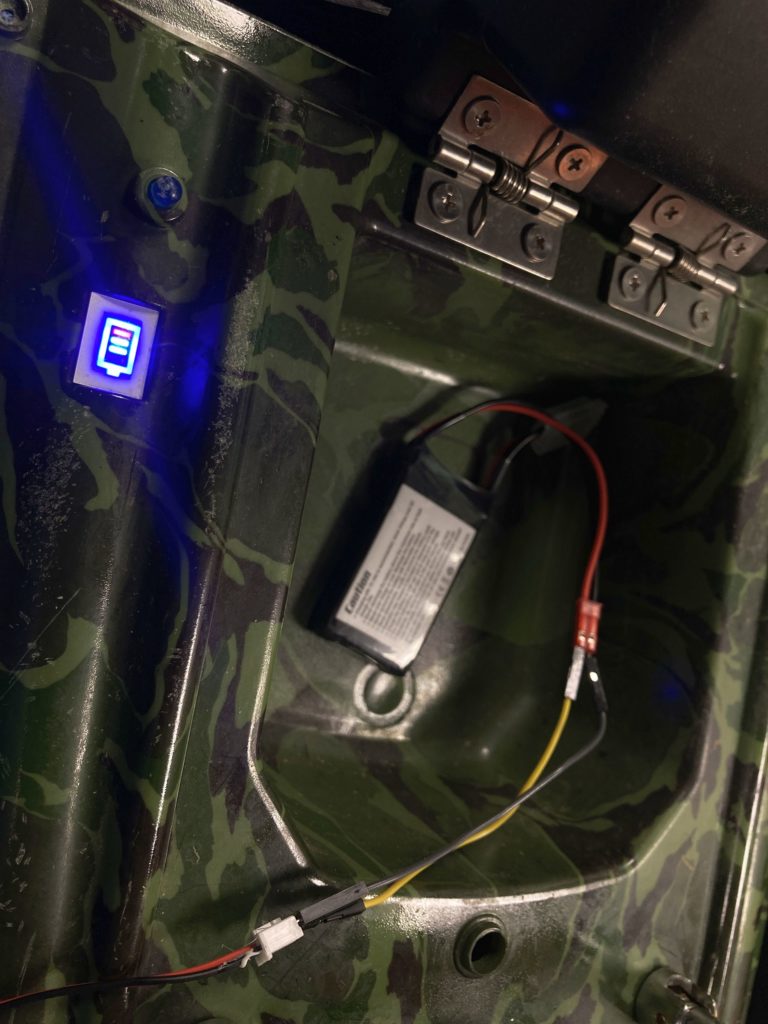
Einen weiteren „Erfolg“ gab es beim Test der Akkuanzeige – die funktioniert!
Jetzt warte ich mal auf die Motorregler mache dann mit dem Umbau weiter. Den Klappenauslösemotor ersetze ich durch einen Servo. Bis die Teile da sind überlege ich noch ob ich die WLAN/Bluetooth-Variante oder die Modellbau-Komponentenvariante baue.