(Oktober 2015) Ich wollte an meinem Lasercutter weiterbasteln und hab mir bei insaneware eine starke Laserdiode und eine passende Schutzbrille(!) bestellt.
Da mir der aber jetzt irgendwie zu klein vorkam und wohl keinen anderen Nutzen hätte ausser Demoobjekt zu sein, dachte ich mir „das geht auch größer“. Ist ja im Prinzip nichts weiter zu tun als die DVD-Laufwerksmotoren, die als X- und Y-Achsenantriebe verwendet werden, durch ordentliche Schrittmotoren mit einer stabilen Führung zu ersetzen. Das alles dann in einen etwas größeren Rahmen gebaut und fertig.
Soweit der Plan in meinem Kopf.
Wir sind aber hier draussen. Also im Keller mit etwas Weizenbier gebrainstormt.
– Was für ein Rahmen???
– X-/Y-Achsen – wie realisieren???
– Zahnriemen oder Gewindespindel???
– Nutzbare Größe???
– Endschalter an den Achsen???
-…
+ weitere Fragen die beim Bauen dann kommen werden
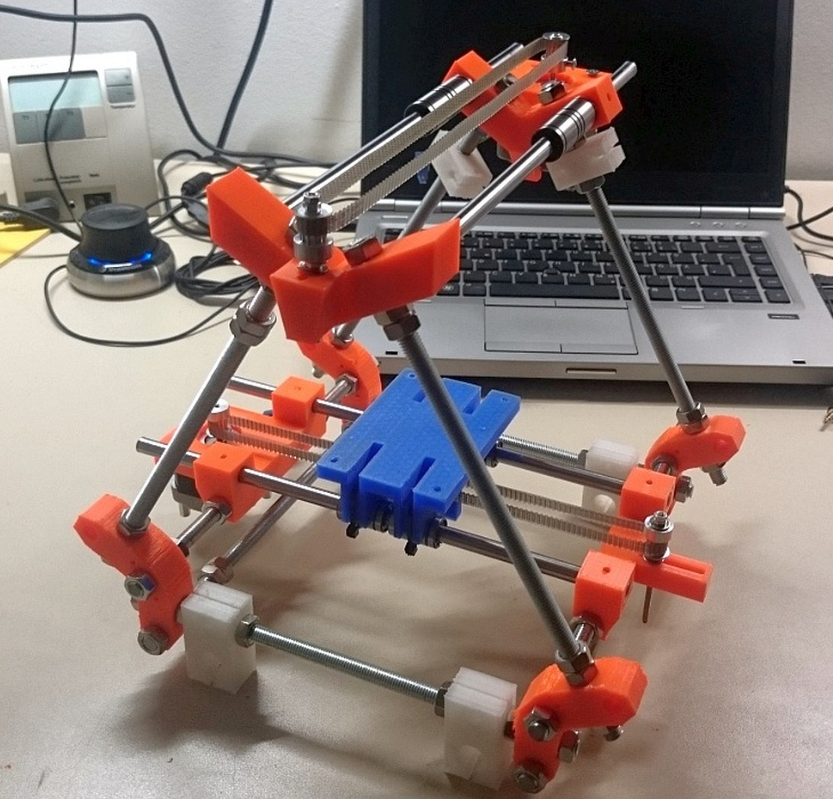
Als Rahmen wählte ich eine Konstruktion die auch bei diversen 3D-Druckern wie bspw. dem „RepRap Mendel“ zum Einsatz kommt. Allerdings konnte ich einige Teile sparen, da ich ja keine Z-Achse benötige. Vom Prinzip her funktioniert das Teil wieder wie eine Portalfräse, nur dass anstatt eines Fräskopfes ein Laser eingeschaltet wird.
Bei den Achsen hab ich mich für Eigenbau-Spindelantriebe entschieden, die ich aus M8-Gewindestangen herstelle. Das ist zwar weniger genau wie Trapezspindeln, aber für die ersten Versuche sollte es reichen. Die Gewindestange kann man später auch sehr einfach gegen eine Trapezspindel tauschen. Die eine Gewindespindel wird einen Schlitten in Links-Rechts-Richtung verfahren, der auf zwei 5mm Rundstahlführungen gleitet und die Vorwärts- bzw. Rückwärtsbewegung wird ähnlich realisiert werden, nur dass ich aus Mangel an 5mm Rundstahl einfach nochmal zwei Gewindestangen M8 als Führungen nehmen werde.
Die nutzbare Fläche wird knapp 120mm x 120mm betragen. Damit sollte man schon etwas mehr anfangen können als bei den 36mm x 36mm der ersten Version.
20151010:
Mechanischer Aufbau ist bei ~75%. Es fehlt noch der Schrittmotor für die untere Achse, beide Mitnehmer für die Schlitten und diverse Halterungen für das Arduino-Board und die Eigenbauplatine mit Spannungsversorgung, Schrittmotortreibern und Halbleiterrelais für die Laserdiode usw..
Nach ein paar Spielereien mit der Laserdiode hab ich sie mit Kühlkörper an den Schlitten montiert und versucht etwas Moosgummi zu schneiden.
Hier das Video vom Test:
20151025:
Ich war die letzten Abende recht fleißig und habe ein paar Sachen aus der ToDo-Liste abgearbeitet. Leider wurde die ToDo-Liste dadurch größer.
Meine Eigenbauführung aus M8 Gewindestangen läuft leider nicht sehr rund und ich bekomme damit keine geraden Linien hin. Grundsätzlich funktioniert der Plotter, da aber beide Achsen aus mehreren Gründen „wobbeln“ wird das so nix. Die Software, die aus den Vektorfiles dann G-Code macht hat auch noch einige Bugs, Im folgenden Video sieht man dass ein Kreis gezeichnet wurde, der in der Ursprungsgrafik nicht vorhanden war.Hier die Ausgangsdatei:

Und hier die Pfade die das Inkscape-Plugin gezogen hat inlusive dem Kreis:

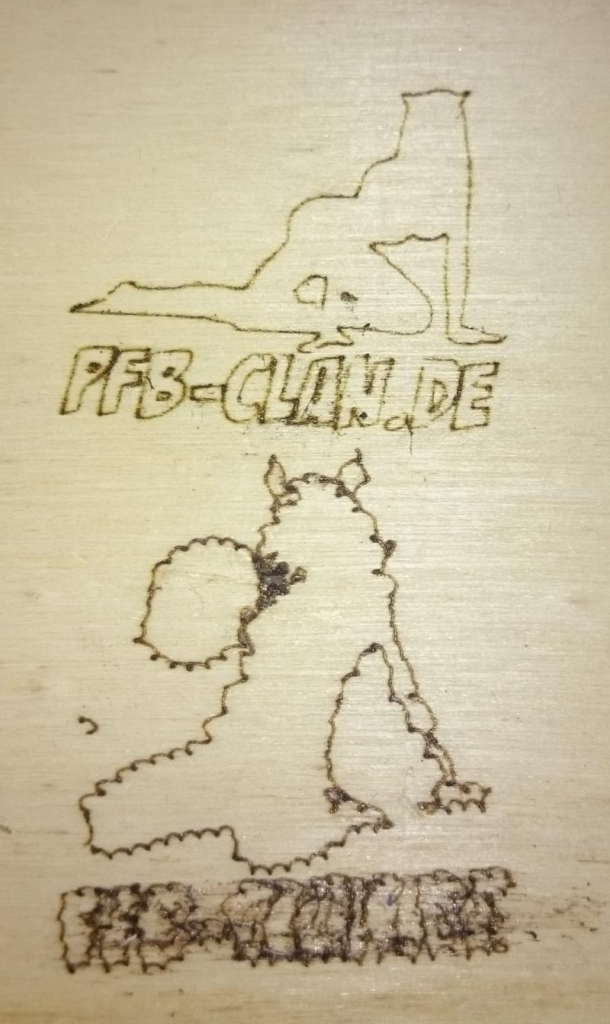
Wo jetzt der Kreis her kommt ist mir ein Rätsel (nach einem Bugreport beim Programmierer des Tools wurde das auch beseitigt), aber egal, ich wollte zeigen wie der Laser seine zittrigen Linien zieht. Da das helle Holz den roten Laser sehr stark reflektiert, habe ich ein Klebeband aufs Holz gepappt, um den „Brandvorgang“ zu beschleunigen. Auf dunkleren Materialien funktioniert das um einiges besser.
Wenn das Teil fertig ist, will ich damit Holzteile beschriften können, Moosgummi und anderes Material zuschneiden und evtl. aus Aufkleberfolien eigene Muster schneiden.
20151222:
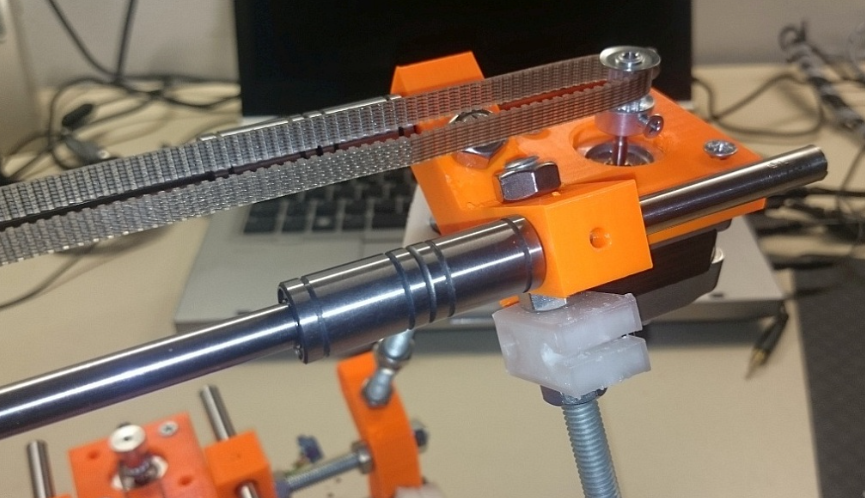
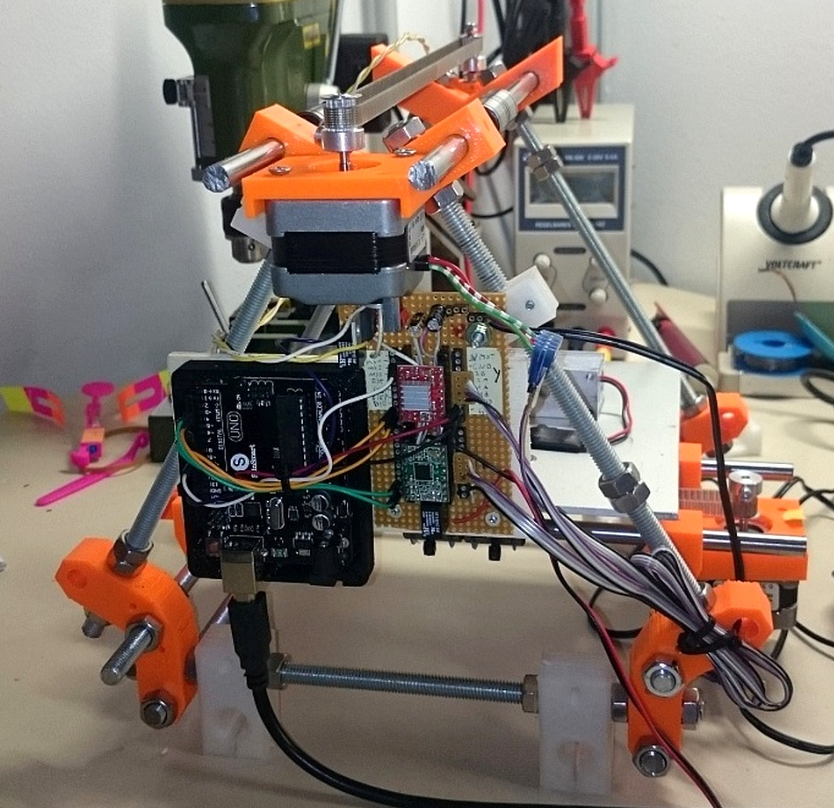
Die letzten Tage/Abende hab ich die Teile für die beiden Achsen im CAD konstruiert. Eine Halterung für den Schrittmotor und eine Halterung für die Umlenkrolle auf der gegenüberliegenden Seite – jeweils für beide Achsen. Die Zahnriemen, Gleitlager und Linearstangen sind auch endlich geliefert worden und wollen verbaut werden.
Die oberen Rahmenteile hab ich als erstes erstellt. Durch die Linearführung und den Zahnriemen, sollte die Laserdiode spielfreier und ruhiger laufen, als mit den unpräzisen Gewindestangen der alten X-Achsenkonstruktion. Die neuen Teile sind so geplant, dass die 8mm dicken Linearstangen, auf denen die Gleitlager laufen wie eingepresst sind. Das garantiert einen nahezu parallelen Verlauf der Führungen, was enorm wichtig ist um überhaupt eine Linearführung mit Zahnriemen zu realisieren.
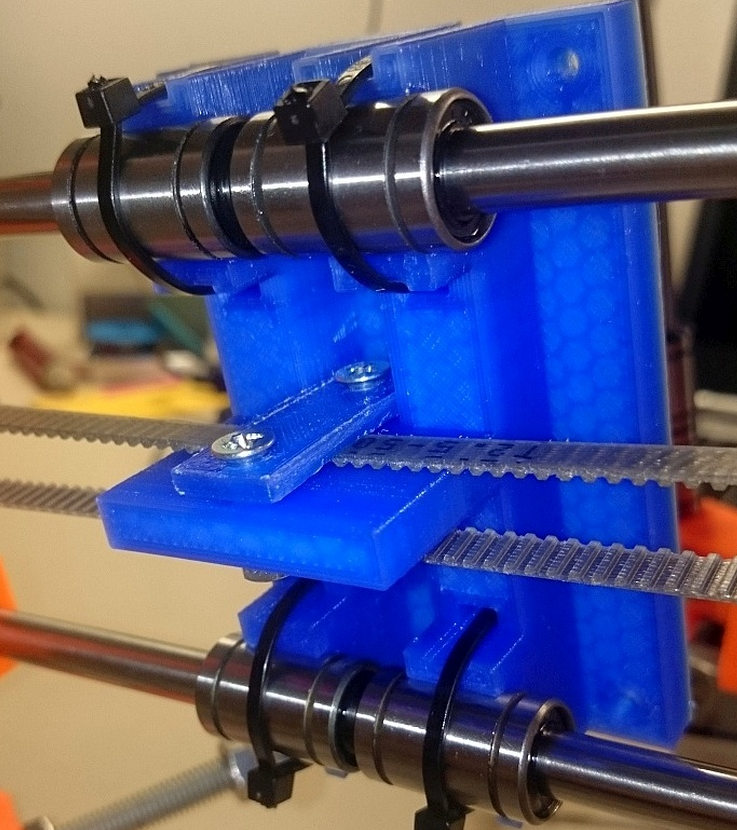
Der Zahnriemen der Y-Achse transportiert den „Arbeitstisch“ vor und zurück. Der Tisch besteht aus einer 165x165x3mm Aluplatte, die ich auf meinen selbst konstruierten und gedruckten Schlitten montiert habe. Die Linearführungen sind auch „quasi“-gepresst in den Halterungen für den Schrittmotor bzw. der Umlenkrolle.
Den Arduino mit der GRBL-Firmware und die „Leistungselektronik“ zur Ansteuerung der Laserdiode und der Schrittmotoren hab ich mithilfe von alten, übrigen Teilen seitlich montiert. dadurch wirkt das Teil schon etwas aufgeräumter und ist weniger anfällig gegenüber losen Leitungen usw.
Das Nächste was mein 3D-Drucker über Nacht produziert hat ist der Schlitten für die X-Achse. Bei dem Teil bin ich gespannt das so funktioniert wie ich denke, weil der Zahnriemen nicht in einer Ebene mit den Linearführungen läuft. Falls es funktioniert kann ich die ersten Probegravuren machen. Die müssen dann ziemlich genau vermessen werden um die Schrittzahlen der X- und Y-Achsen anzupassen

20151225:
Das gedruckte Teil war für die Tonne. Hab mich an einer kritischen Stelle um 3,7mm vermessen – wer viel misst, misst Mist. Das korrigierte Teil ist aber mittlerweile auch fertig geworden und im Laserplotter verbaut. Als ich das neu gedruckte Teil verbaut habe, ist mir gleich noch eine Verbesserung eingefallen, an die ich komischerweise nicht gleich gedacht hab, im CAD ist es auf jeden Fall schon fertig. Ich habe die Aufnahme für die Laserdiode viel höher gemacht und mit einem Langloch versehen, falls ich mal auf ein höheres Objekt lasern will, kann ich so einfach die Diode höher montieren und bin so wieder in der Fokusebene (Laser sind zwar stark gebündeltes Licht, aber trotzdem nur in einem bestimmten Abstand wirklich scharf und können nur in der Fokusebene mit ihrer vollen Leistung wirken. Hier mal ein erster Probeplott auf dem gleichen Stück Holz, auf dem schon das verwackelte Devilbabe eingebrannt wurde.
Mittlerweile bereue ich den Kauf der roten Laserdiode. Rot ist echt zu langwellig um damit helle Oberflächen zu bearbeiten. Ich hab schonmal eine UltraViolett-Laser-Diode bestellt, die hat zwar „nur“ 175″mW anstatt der 230mW der roten, aber dafür wirkt UV-Licht besser auf hellen Oberflächen.
Hier mal ein direkter Vergleich zwischen der alten M8-Gewindestangenführung und der neuen Zahnriemenführung. Oben die neue und unten die alte Gravur – ist schon um einiges besser.
20160229:
Der Laserplotter ist auch in der Zwischenzeit fertig geworden. Die Endstops sind montiert, in der Firmware eingebunden und funktionieren. Jetzt bin ich noch auf der Suche nach anderen Inkscape-Plugins, die nicht nur Konturen können, sondern auch Flächen in einzelne Linien auflösen um auch Flächen lasern zu können. Bilder und Video vom fertigen Plotter kommen die Tage.
20160918:
Fleißarbeit oder Bonus: Da ich noch nicht 100% zufrieden mit der Funktion des Plotters war und ich bisher „nur“ Konturen plotten konnte, wollte ich mehr! Nach einiger Recherche im Netz fand ich einige China-Laserplotter, die technisch meinem ersten Prototyp mit den CD/DVD-ROM-Laufwerksmotoren ähnelten. Die warben jedoch damit, Flächen füllen zu können, was mir bisher nicht gelungen ist. Der Umweg in Inkscape eine Fläche zu schraffieren und das dann abfahren zu lassen war zu kompliziert und langwierig. Bei Instructables hab ich dann eine Anleitung gefunden, in der der Anleitende eine Software angehängt hat, die auch GCode für gefüllte Flächen ausspukt – der Bildaufbau ist dann ähnlich einem Bildschirm oder einem Drucker, also Zeilenweise. GCode – ihr erinnert euch – ist lesbarer Maschinencode, der im Prinzip die Befehle für die Achsen und Start-Stopp für die Werkzeuge (Bohrer, Fräskopf, Laser, usw.) einer Maschine beinhaltet. Die bei Instructables angehängte Software ist leider chinesisch oder irgendwas in der Art. Aber man hat eh kaum Einstellmöglichkeiten. Als ich den GCode der Software ausprobierte, hat nur der Laser geflackert, aber die Motoren haben keinen Mucks gemacht. Da Gcode ja „human readable“ ist hab ich mir das angeschaut und die Chinasoftware hat wohl einen Fehler oder ist für andere Interpreter wie das von mir genutzte GRBL (Firmware im Arduino-µController). Ich muss alle „,“ bei den Koordinaten in „.“ ändern, dann klappt es. Die Datei im Video hat ca. 7000 Zeilen GCode. Jetzt erweitert sich das Einsatzspektrum des Plotters nochmal gewaltig. Wenn ich jetzt noch eine Möglichkeit finde durch verschiedene Geschwindigkeiten noch Graustufen zu plotten, wäre ich absolut begeistert.
Das Zeitraffervideo (in echt hat das ca. 20 Minuten gedauert):
Das Ergebnis:

Wer das Teil nachbauen will, findet die 3D-Druck-Dateien auf Thingiverse.