In einer der letzten „make“-Ausgaben war ein Artikel über einen kleinen Indoor-Quadrocopter mir Live-Kamera für FPV-Flug (First-Person-View) drin, den man angeblich einfach und günstig nachbauen kann.
Hier Link zum Artikel: https://www.heise.de/make/artikel/Mikro-FPV-Quadcopter-aus-dem-3D-Drucker-3988481.html
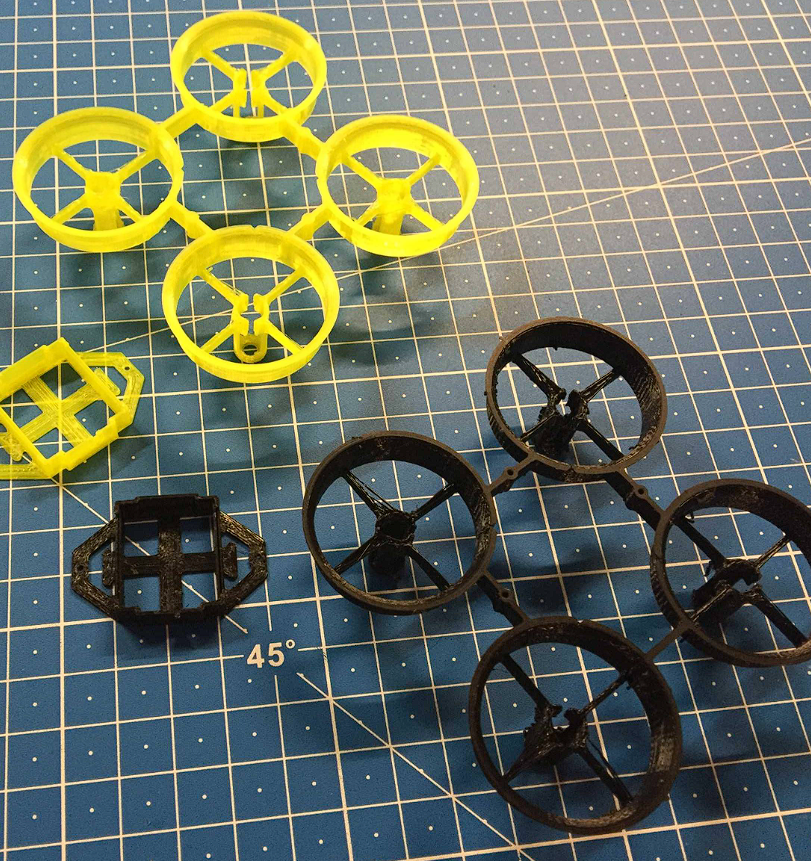
Drucker hab ich, FPV-Brille und Fernbedienung hab ich von meinem anderen Copter, den ich viel zu selten fliege schon zuhause. Also restliche Bauteilliste bei den bekannten Chinesen geordert und gewartet bis alles da ist. Während der Wartezeit hab ich dann mehrere Rahmen gedruckt und mich weiter in das Thema der kleinen Indoor-FPV-Copter eingelesen.
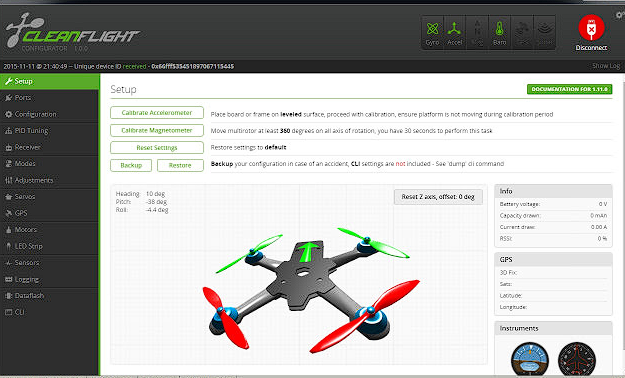
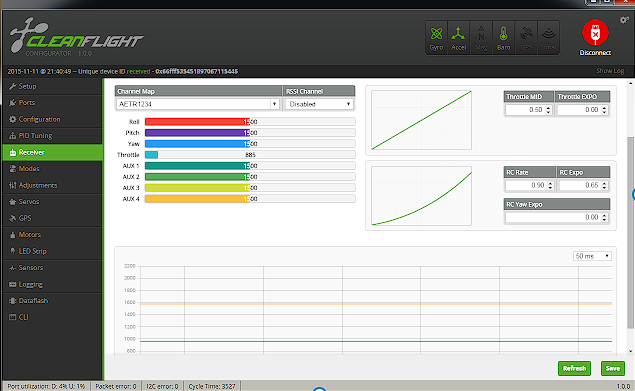
Zur Geschichte der Tiny-Whoops, wie die kleinen Copter genannt werden: Scheinbar hat alles so richtig mit dem Blade Inductrix angefangen, der dann von vielen Leuten ordentlich gemodded wurde. Vom Inductrix stammen auch die „Standardmaße“ für die Rahmen und die Platinenaufnahmen, denn es gibt mittlerweile verschiedene Flugsteuerungen (FC) die von den Abmessungen her auf den Rahmen des Inductrix und weiterer Chinaklone passen. Diese neuen FCs bieten abartig viele Möglichkeiten zur Programmierung, Abstimmung usw.. Dazu gibt es im Wesentlichen zwei Firmwares die auf den kleinen 32bit-Rechnern laufen, einmal Cleanflight und einmal Betaflight. Ich hab mich nicht groß mit der Geschichte der beiden beschäftigt, sie scheinen aber ein gemeinsames Grundgerüst zu haben, auch die Software selbst, die als Chrome-App auf allen möglichen Systemen lauffähig ist, sieht sehr ähnlich, wenn nicht sogar gleich aus.
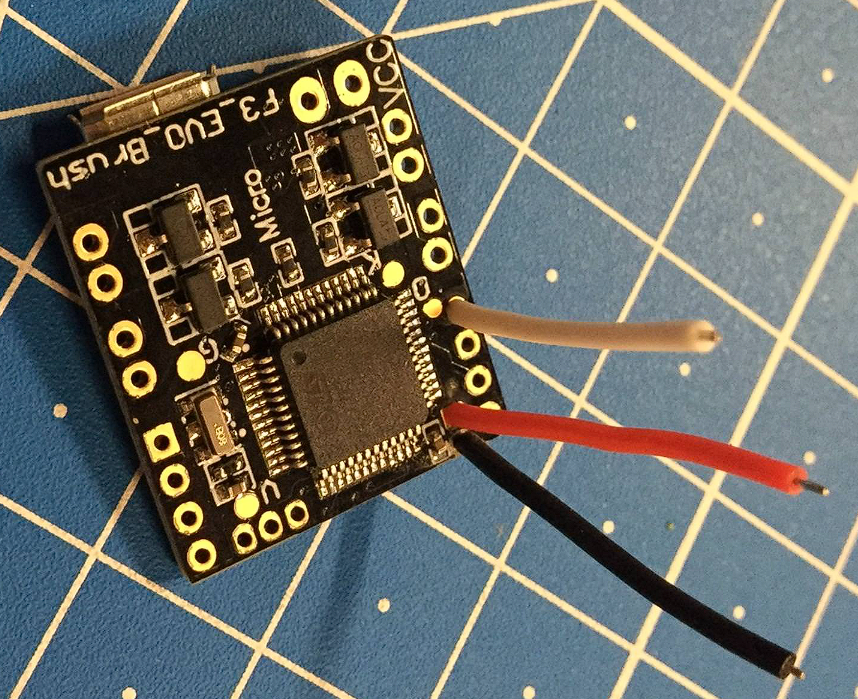
Bestellt hab ich den FC aus der Liste und einen passenden Empfänger zu meiner Fernbedienung (Flysky FS-i6). Es gibt auch FCs, die einen Empfänger integriert haben, aber dazu komme ich noch. Als endlich das Chinapaket ankam hab ich mich dran gemacht und den Empfänger und den FC zusammengelötet
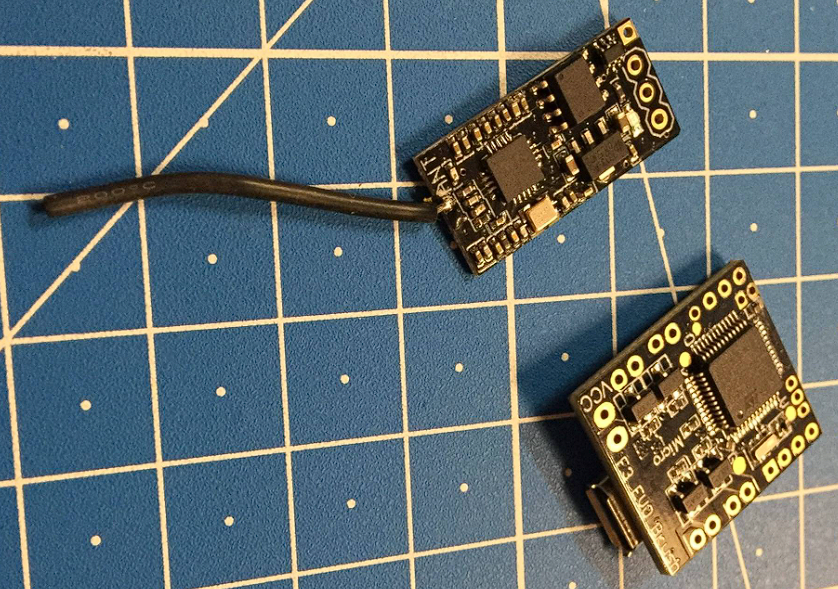
Man braucht nur 3 Leitungen, Versorgungsspannung + und – und das PPM-Signal, über das der Empfänger die Daten an den FC überträgt.
und in das Carriage gebaut.
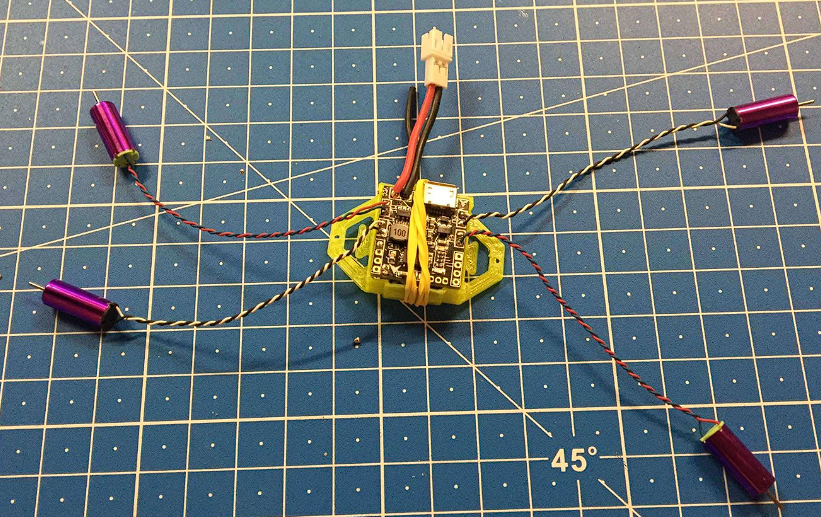
Die Motoren hab ich auch gleich an den FC gelötet, da der FC keine Stecker hat, wie andere von BetaFPV oder Eachine usw.. Dann hab ich wie beschrieben die Firmware aktualisiert und auch den Lageregler kalibriert. Es ist echt der Hammer was in dem kleinem FC alles an Technik steckt. In der Software kann man direkt sehen wie der Empfänger die Signale vom Sender an den FC weitergibt.
Die Kamera braucht natürlich auch Strom, deshalb wurde sie direkt an den Anschluss des FCs gelötet. Nachdem alles im Rahmen verbaut war und ich den Akku das erste mal anschloss kam aber der erste Dämpfer. Ein Motor drehte ohne Signal direkt los. Den Fehler konnte ich auch nicht beheben, scheinbar ein Hardwaredefekt (FET oder so am FC defekt). Naja – Reklamiert und wieder warten. Während der Wartezeit hab ich dann mal noch ein paar andere Flugregler und Empfänger bestellt. Durch die viele Testerei hab ich jetzt zwei Test-Copter die schon recht gut funktionieren.

Den linken hab ich in einen Nachbau-Rahmen gebaut, der kostet auch nur ~2€.